Úgy hozta az élet, hogy munkám során egy CNC megmunkáló központ egyik tengelyének hajtását kellett ellenőriznem. A tengely végén egy 1FT5066-0af01-2-z típusjelölésű motor volt. Némi utánajárással megállapítottam, hogy ez a motor egy háromfázisú BLDC motor, a tengelyén egy szintén háromfázisú tachogenerátorral, ami az analóg szabályozott hajtás felé ad a fordulatszámmal arányos feszültségjelet, valamint egy rotor pozíció ecodert is tartalmaz. A tengely végén egy ROD426 típusú encoder ad jelet a CNC gép számítógépe számára.
Először megkerestem az interneten a motorhoz tartozó gyári szerviz manuált, ebben hamar megtaláltam a beállítás lépéseit és mérési eljárását. A géphez tartozó dokumentációban a motor csatlakoztató kábel bekötését is sikerült előtaláljam, mert a szerviz manuálban ennek a kábelnek a bekötésére is hivatkoznak.
A motor kapocstáblájának belső oldalán a motorról némi információt sikerült megtudjak:
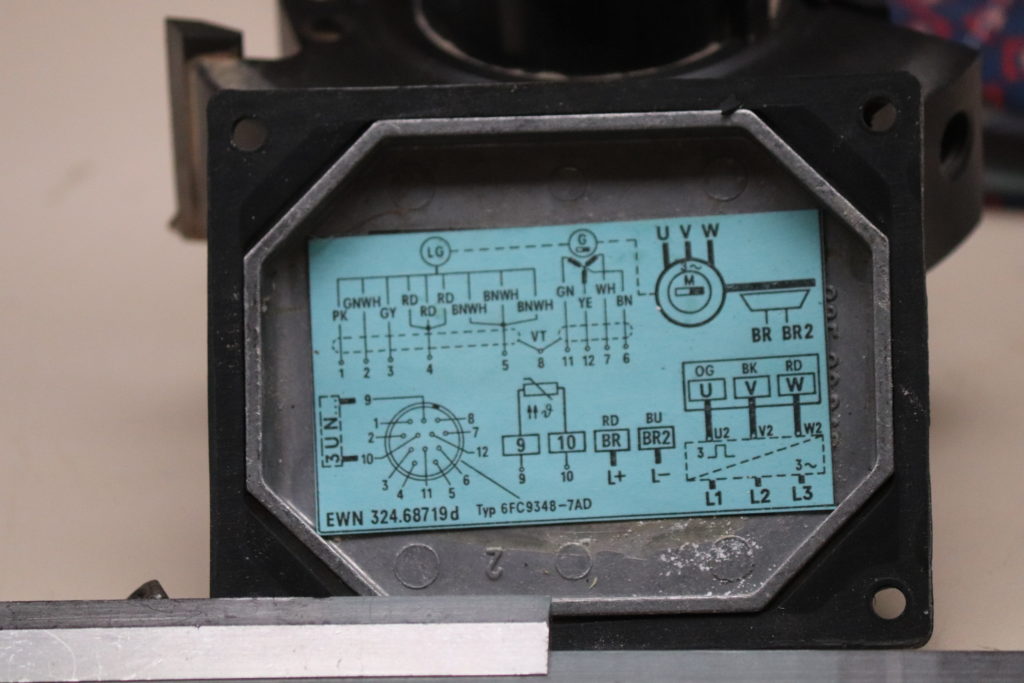
Látható a bal felső részén jobbról bal felé a tengely fék, majd a hajtó főmotor, a tachhométer generátor és a rotor pzíció encoder „LG” jellel.
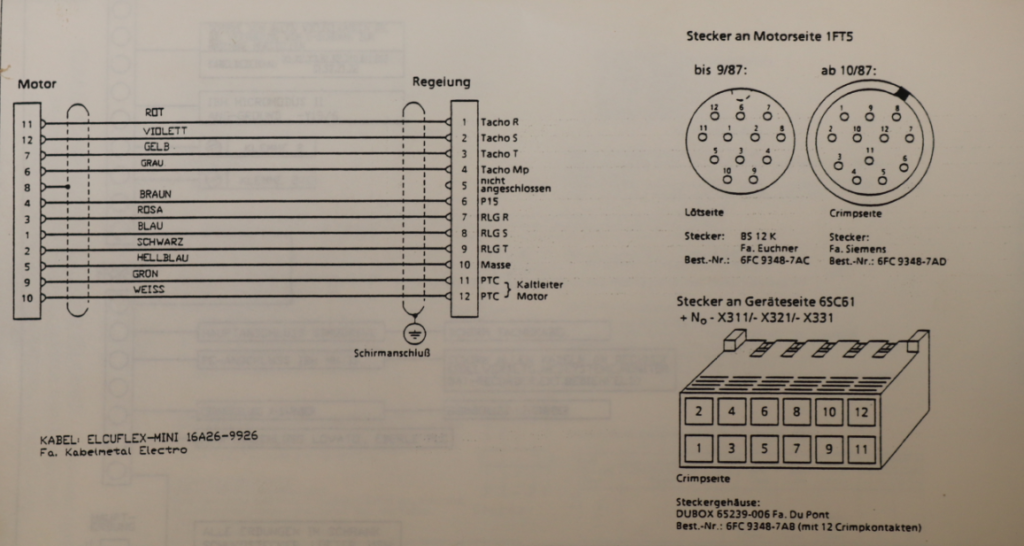
A csatlakozó kábelről rendelkezésre állt rajz:
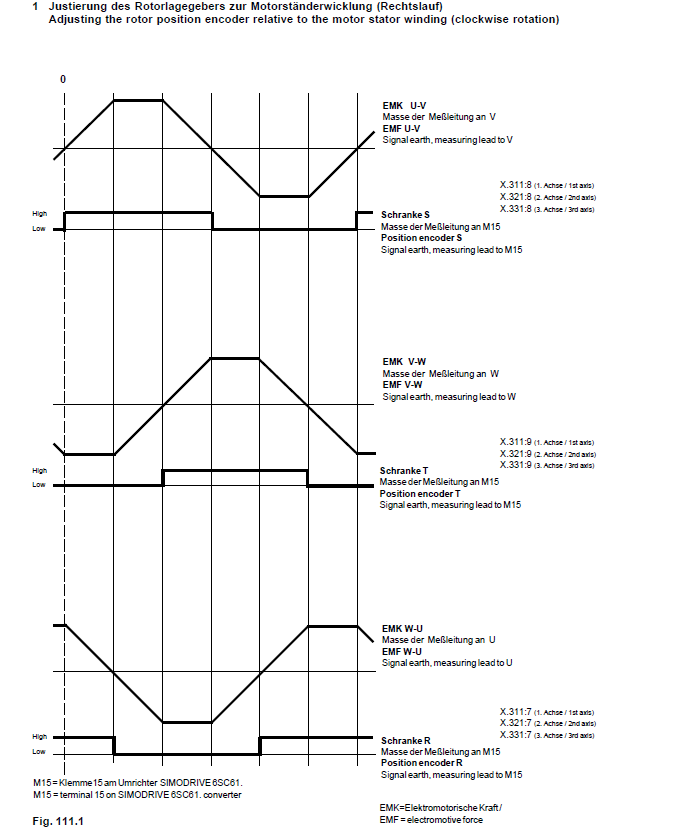
A szerviz manuálban a mérésekről a következő leírást olvastam:
A motor tengelynek, a tachogenerátor forgórésznek és a rotor encodernek egymáshoz viszonyított szöghelyzetét nagyon pontosan minden szétszedés vagy javítás után be kell állítani illetve ellenőrizni. A mérendő jelek a a főmotor tekercseiben indukált feszültség, a tachogenerátor kapcsain megjelenő indukált feszültség és a rotor pozíció encoder kapcsain mérhető jel. A mérés idejére a motor tengelyét a hajtás felőli oldalról nézve az óramutató járásával megegyező irányba kell forgatni, majd a kívánt jeleket oszcilloszkóppal mérni és ellenőrizni. Először a főmotor indukált feszültsége és a rotor pozíció encoder egymáshoz viszonyított helyzetének ellenőrzésére szolgáló mérési eljárás:
Persze az élet soha nem olyan egyszerű, mint a dokumentáció. A mérés elvégzését lehetetlenné tette, hogy a rotor pozíció encoder jele bizony nem jött ki a megfelelő kivezetésen, sőt semmilyen más ponton sem. Összehasonlító mérést végeztem egy másik tengellyel is, és legnagyobb megdöbbenésemre a biztosan jól működő motorból sem jött rotor pozíció encoder jel! Nem volt mit tenni, a szabályozott hajtás oldaláról vizsgáltam tovább az encoder jelének problémáját, majd rájöttem, hogy az encoder jele csak akkor jelenik meg, ha azt tápenergiával látom el. A csatlakozó hajtásban a csatlakozó 6. lábához 12V tápfeszültség kapcsolódik egy soros 100 Ohm ellenálláson keresztül, aminek nyilvánvalóan az volt a célja, hogy bármilyen külső zárlat okán kialakuló áram semmiben se tegyen kárt.
Ennek az információnak a birtokában a 10. kivezetést a mérőföldre, a 6.kivezetést egy soros áramkorlátozó ellenállást bekötve +12V tápfeszültségre kapcsoltam. A kimeneteken azonban csak időnként megszűnő zajt mértem. Ekkor vált nyilvánvalóvá számomra, hogy a kimenet nyilvánvalóan open-collector típusú, így a mért kimenetre egy 10 kOhm felhúzó ellenállást kötöttem. Sajnos ez is kimaradt a dokumentációból, de ezután már el tudtam végezni a mérést.
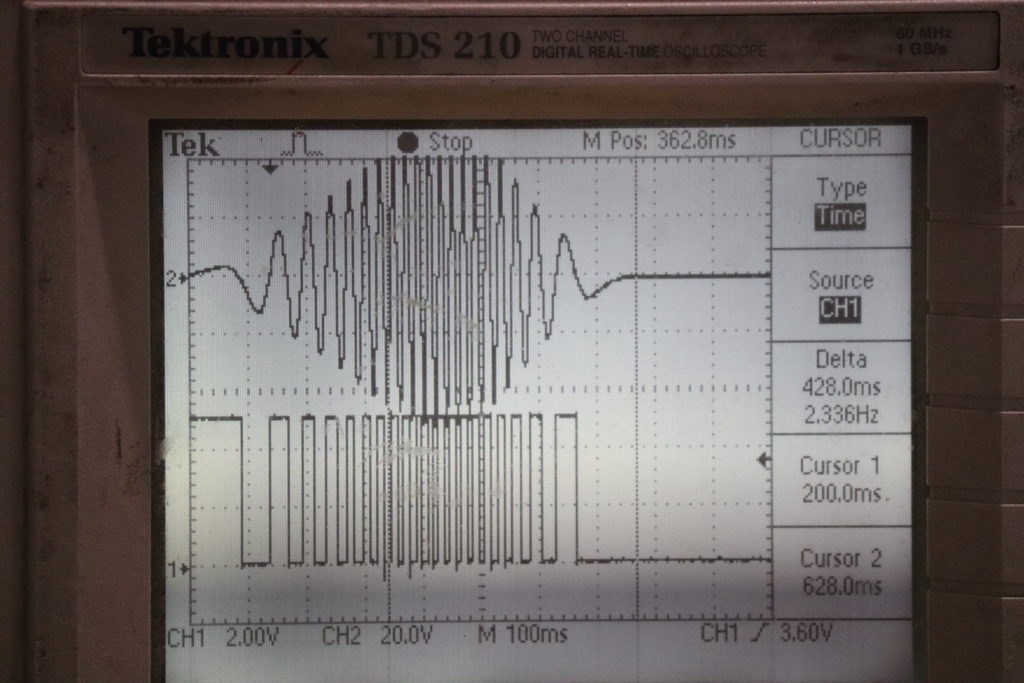
A motor tengelyére spárgát tekertem, majd azt kézzel meghúztam. A motor kivezetésein (2. sugár) és a rotor pozíció encoder kimenetén (1. sugár) mért jelet az oszcilloszkóppal rögzítettem. Trigger az encoder jel lefutó éle volt.
Amint láttam hogy sikerült érdemi jelet rögzítenem nagyon megörültem, belenagyítottam és kiértékeltem a mérést az előirat szerint:
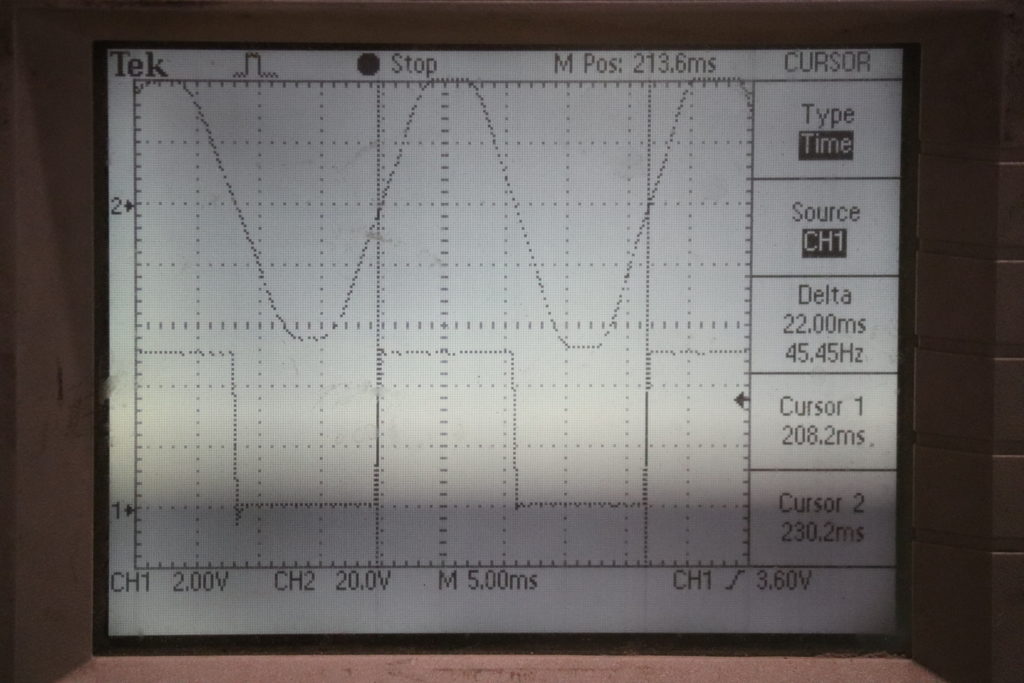
A kurzorokat az encoder jel éleire állítottam és ellenőríztem a forgórész indukált feszültségének nullátmenetével (2. tengely) Mivel precíz egyezét láttam a beállítás jónak bizonyult.
Az előírás szerint mind a hat esetet végigmértem, vagyis az encoder jelhez képest a főmotor tekercseinek indukált feszültségét (3 mérés) és a tachogenerátor tekercseinek indukált feszültségét (3 mérés) egymáshoz képesti fázishelyzetét ellenőriztem az előírás szerint.
Remélem másnak, aki hasonló témában keres az interneten releváns információt tudtam adni. Sajnos a dokumnetáció és a valóság eléggé messze voltak egymástól, de kis ügyességgel meg lehetett oldani a problémát!